Przedstawiamy ostatni artykuł z cyklu o procesie projektowania w oprogramowaniu Autodesk na przykładzie zaprojektowanego robota mobilnego z bardzo nietypowym napędem.
Część 3 – wykorzystanie programu Autodesk Inventor do projektowania mechanizmów robota.
W ostatnim artykule z cyklu, przedstawimy w jaki sposób zamodelowane części robota zostały przygotowane do produkcji. Do wykonania robota prócz elementów gotowych takich jak serwomechanizmy, łożyska, dystanse itd. należało wykonać także części dedykowane; korpus, podpory pod łożyska, orczyki z wałem oraz mocowania.
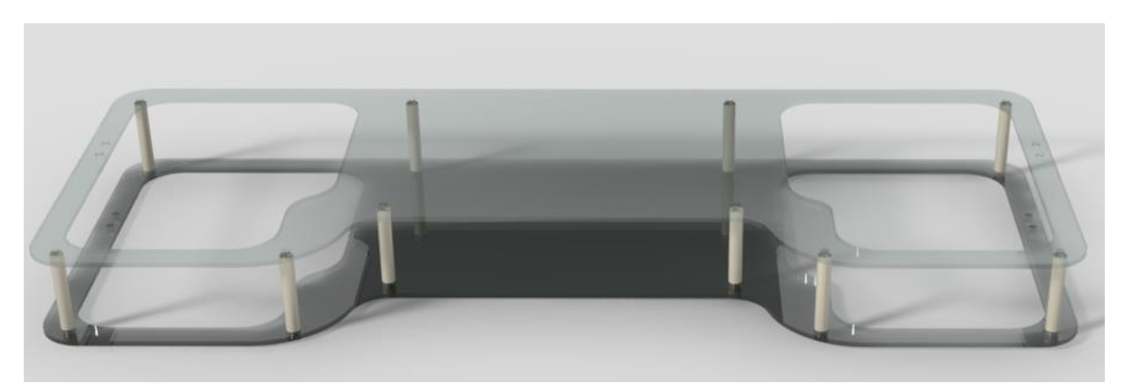
Na początek należało wykonać korpus który jest ramą, stanowiącą podstawę do zamocowania mechanizmów obrotu sfer wraz z napędami oraz układów elektroniki. Rama składa się z dwóch płyt połączonych ze sobą poprzez dystanse i połączenia śrubowe. Model 3D korpusu pokazano na rysunku 1.
Rysunek 1 Model 3D ramy robota wykonany w oprogramowaniu Inventor
Jako materiał z którego zostanie wykonana rama wybrano materiał PMMA często nazywany plexi. Każdą z płyt wycięto z zastosowaniem cięcia laserowego. Ścieżka cięcia dla lasera została przygotowana z modelu części przez wygenerowanie obrysu części. Na takim rysunku nie mogą znajdować się linie pomocnicze, wymiary, ani osie, linie nie mogą się powielać. Ważne jest także aby otwory i zaokrąglenia były wykonane odpowiednią funkcją, ponieważ w niekorzystnym przypadku maszyna może zinterpretować otwór jako grupę wielu krótkich odcinków. Konsekwencją tego będą nadpalenia spowodowane początkowym włączeniem lasera w momencie kiedy głowica jeszcze się nie porusza i następuje większe rozgrzanie się materiału w tym punkcie.
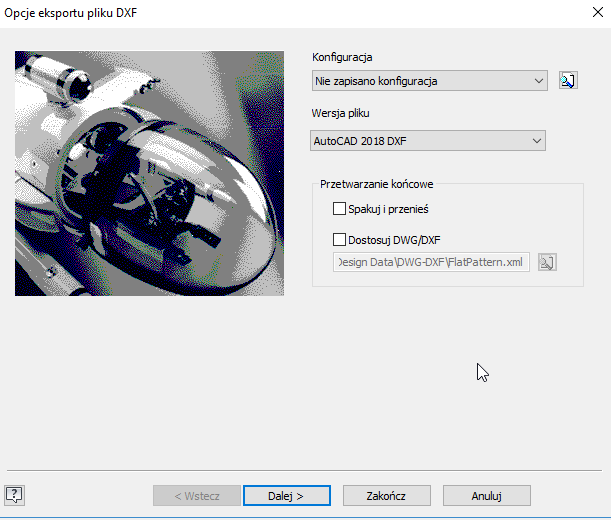
Rysunek 2
Z zespołu który pokazano w poprzednim artykule otworzono w programie Autodesk Inventor płytę górną jako pojedynczą część. Następnie za pomocą polecenia „Exportuj powierzchnie jako” zapis powierzchni modelu do formatu dxf i stworzono rysunek na którym są tylko ścieżki cięcia. Kreator zapisu do DXF oferuje kilka przydatnych narzędzi znacznie ułatwiających przygotowanie ścieżek np.: przeniesienie modelu do „dodatniej” ćwiartki układ współrzędnych, dokładność zamiany splajnów na linie proste, zapis DXF do odpowiedniej wersji. Dzięki tej funkcji możemy szybko przygotować obrys części do obróbki bez dodatkowych czynności edycyjnych.
Kolejnymi elementami do wykonania były mocowania i orczyki. Są to elementy przestrzenne dlatego do ich wykonania wykorzystano technologie druku 3D. Oprogramowanie Autodesk Inventor posiada swoje własne środowisko do tworzenia plików do drukarek 3D. Druk 3D odbywa się bardzo podobnie jak w przypadku cięcia laserem. Program ustala ścieżkę po której drukarka rozprowadza stopiony materiał. Następnie głowica jest podnoszona nieznacznie do góry i prowadzona jest kolejna warstwa tworzywa. Przygotowanie pliku wiąże się z tym samym problemem co w przypadku lasera, czyli zamiana modelu na ścieżkę dla drukarki. Przygotowując plik do drukarki trzeba zwrócić uwagę na technologię i pracę z tworzywami sztucznymi np.: stopiony materiał może opadać lub rozciągać się, przez co końcowy efekt nie zawsze jest taki jak oczekiwano. Środowisko Inventora jest pod tym względem bardzo dopracowane.
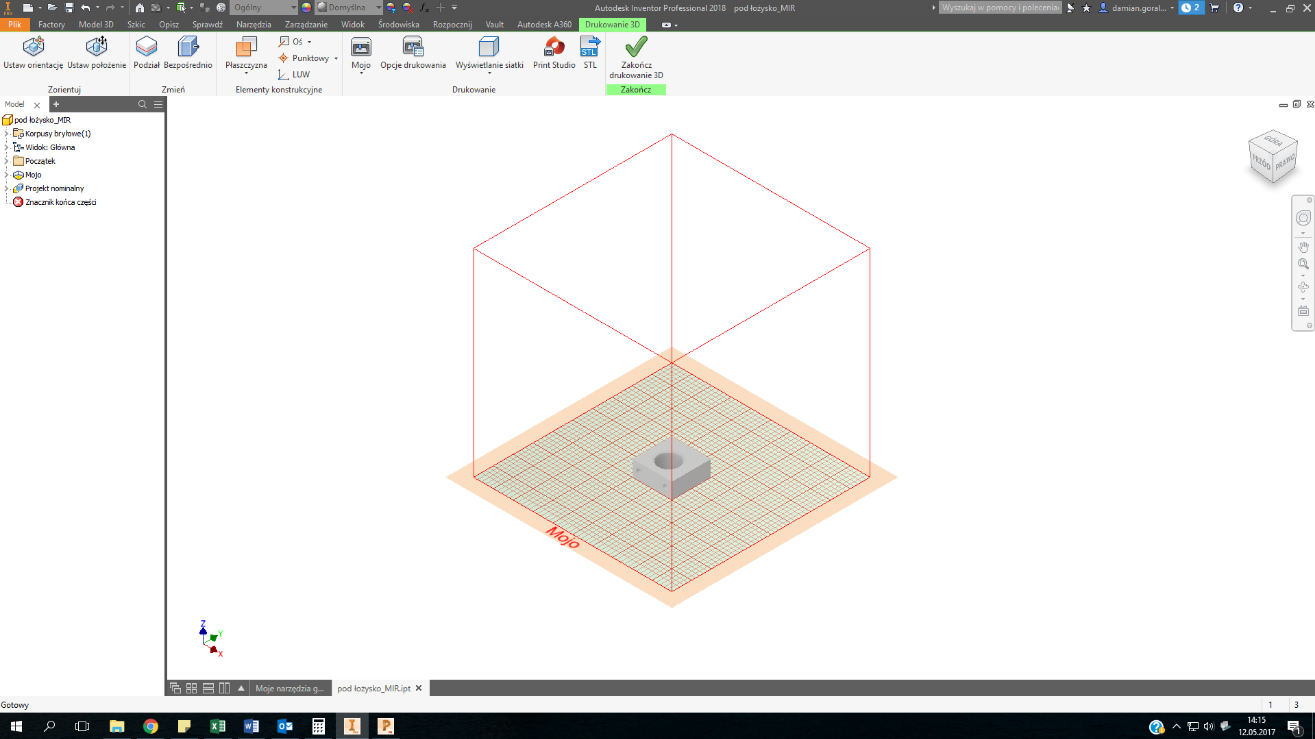
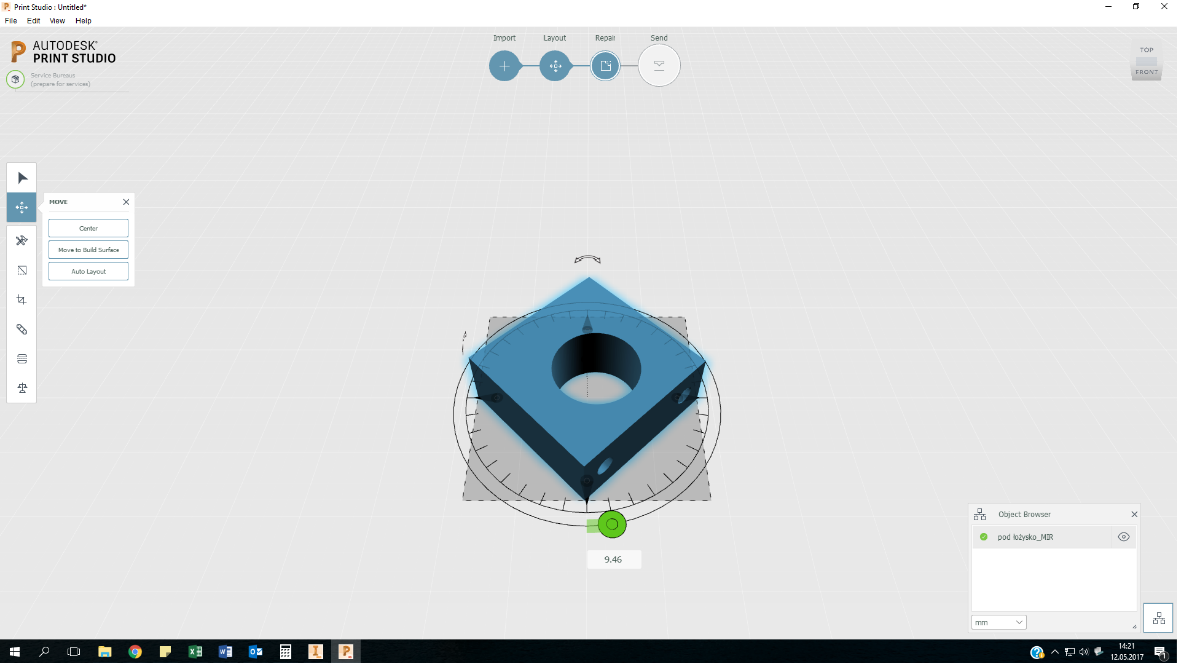
Po wybraniu elementu ( w naszym przypadku jest to podpora łożyska ) przechodzimy do środowiska drukowanie 3D (rysunek 2). W tym środowisku możemy wybrać drukarkę oraz ustawić parametry zapisu do formatu stl. Plik w takim formacie jest następnie zmieniany na program do drukarki. Aby to zrobić należy przejść do darmowego programu Autodesk Print Studio i zapisać plik w podanym formacie.
Rysunek 3 Środowisko drukowania 3D programu Inventor
Środowisko pozwala na edycje rozmiarów, mierzenie, ustalanie podstawy itd. (rysunek 3). Dzięki tym narzędziom można w bardzo szybki sposób przygotować model do wydruku.
Rysunek 4 Środowisko Print Studio
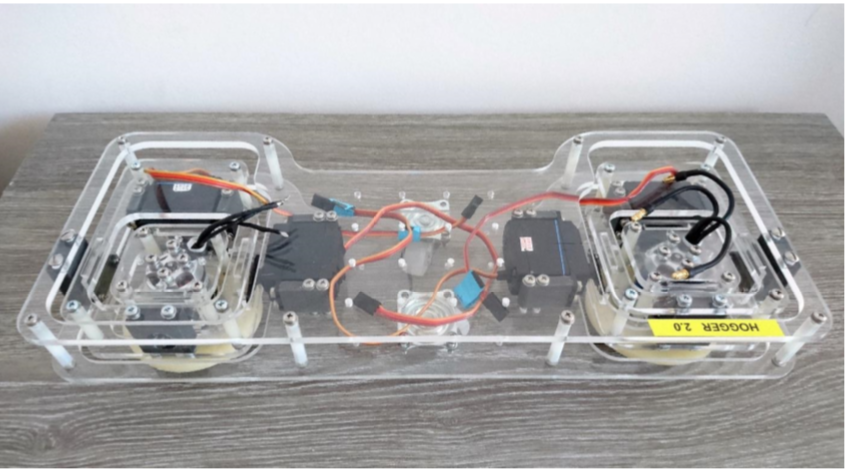
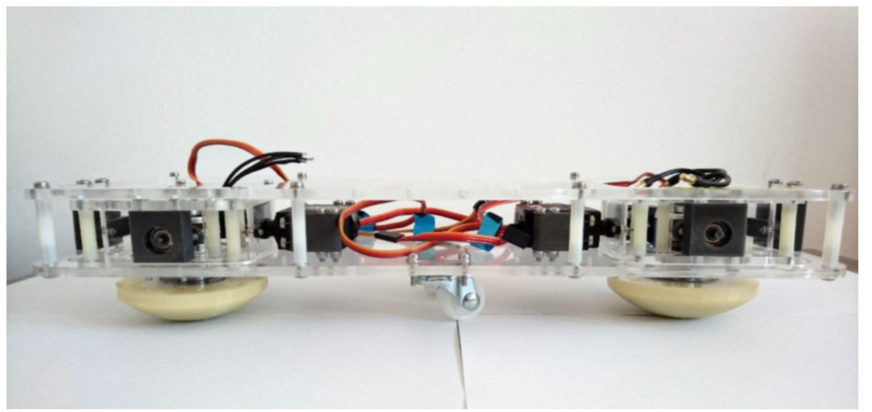
Wykorzystując programy Autodesk AutoCAD Mechanical i Inventor powstały modele każdego elementu, zostało stworzone złożenie całego robota, wygenerowano dokumentacje, oraz przygotowano pliki do produkcji. Kończąc cyfrowe projektowanie robota przystąpiono do złożenia konstrukcji i przetestowania jego własności jezdnych (rysunek 4-5). Robot zgodnie z założeniami okazał się być bardzo szybki, zwrotny. Napęd półsferyczny pozwala momentalnie zmienić kierunek ruchu, a jego wysokie przyspieszenie sprawiało wiele frajdy podczas podczas testów.
My, PCC Polska Spółka Jawna, i nasi partnerzy, korzystamy na naszych stronach z plików cookies (ciasteczek). Część z nich jest niezbędna dla funkcjonowania stron. Pozostałe możemy wykorzystywać do:
- analizy w jaki sposób korzystasz z naszej strony,
- personalizacji prezentowanych Ci treści,
- marketingu, reklamy i na potrzeby mediów społecznościowych.
Te pliki cookie sa niezbędne dla poprawnego funkcjonowania strony internetowej. Umożliwiają działanie podstawowych funkcji takich jak nawigacja na stronie, preferencje prywatności, logowanie, wypełnianie formularzy i zapytań o ofertę. Nie mogą być wyłączone w naszej witrynie.
Preferencje
Służą do przechowywania informacji o preferencjach, o które nie prosi subskrybent lub użytkownik. Wykorzystywane są w celu interakcji z użytkownikiem, który wcześniej odwiedził witrynę.
Statystyka
Te pliki cookie pomagają nam zrozumieć, w jaki sposób różni użytkownicy zachowują się na stronie, gromadząc i raportując anonimowe informacje.Przechowywanie techniczne lub dostęp, który jest używany wyłącznie do anonimowych celów statystycznych. Bez wezwania do sądu, dobrowolnego podporządkowania się dostawcy usług internetowych lub dodatkowych zapisów od strony trzeciej, informacje przechowywane lub pobierane wyłącznie w tym celu zwykle nie mogą być wykorzystywane do identyfikacji użytkownika.
Marketing
Marketingowe pliki cookie służą do śledzenia użytkownika w witrynach internetowych, aby prezentować mu odpowiednie reklamy, interesujące i zgodnie z profilem użytkownika. Są bardziej cenne dla wydawców i reklamodawców zewnętrznych.