Przedstawiamy kolejny artykuł z cyklu o procesie projektowania w oprogramowaniu Autodesk, na przykładzie, zaprojektowanego oraz wykonanego przez studenta Politechniki Wrocławskiej, robota mobilnego z bardzo nietypowym napędem.
Jak powstawał robot w programie Autodesk Inventor?
„Nietypowy robot napędzany dwiema półsferami. Praca inżynierska stworzona przez studenta Politechniki Wrocławskiej z użyciem oprogramowania Autodesk.„
Część 2 – wykorzystanie programu Autodesk Inventor do projektowania mechanizmów robota.
W drugim artykule z cyklu, przedstawimy w jaki sposób części robota zostały zamodelowane w programie Autodesk Inventor, jakich użyto narzędzi do projektowania i tworzenia dokumentacji oraz przedstawimy animację mechanizmu wychylania półsfer.
Na podstawie schematu układu kinematycznego przedstawionego w poprzedniej części artykułu zaprojektowano mechanizm składający się z dwóch przestrzennych ramek, mocowanych do korpusu. Każda ramka umożliwia wychylenie półsfery względem dwóch osi, prostopadłych do osi wirującej półsfery.
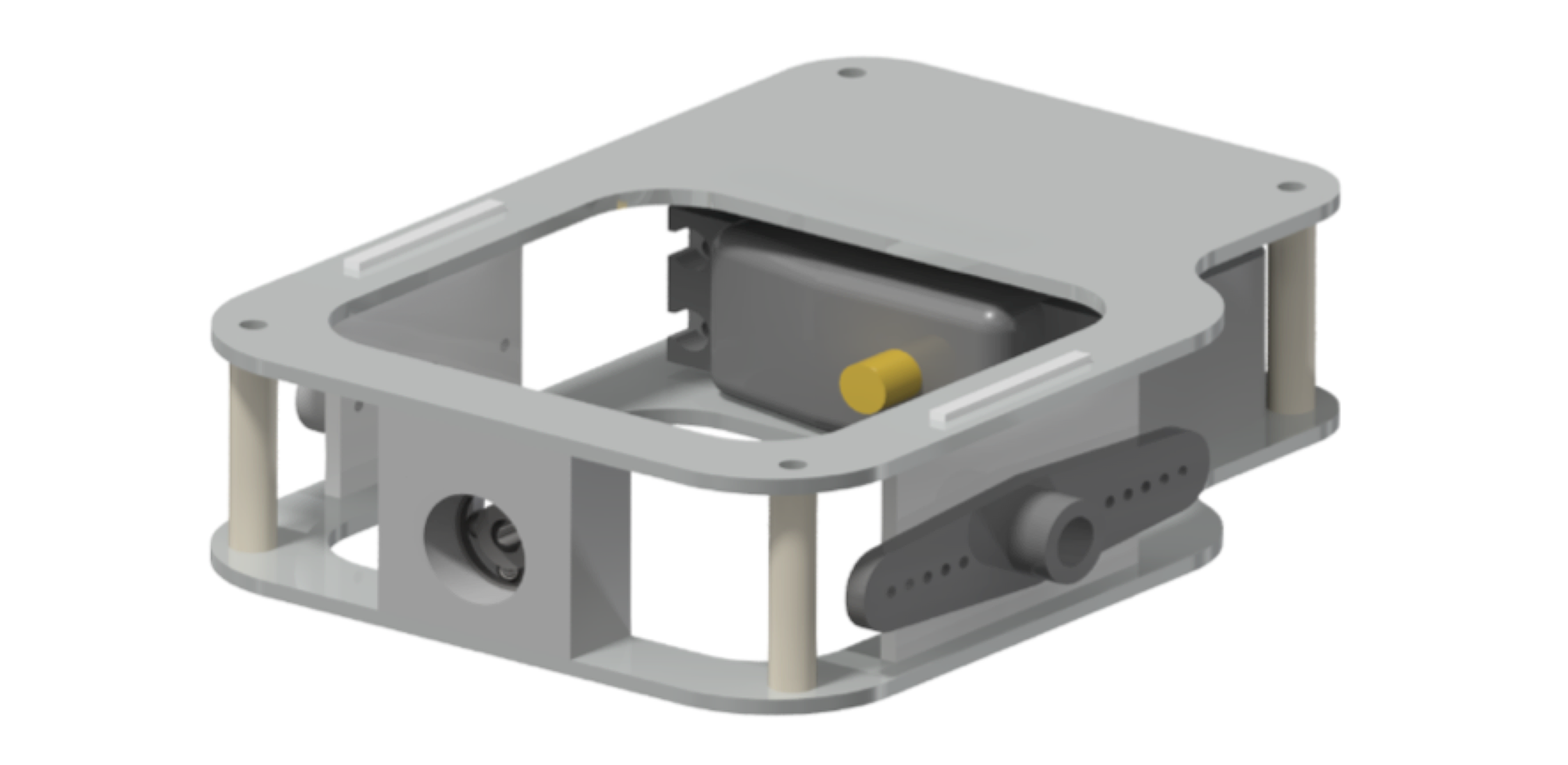
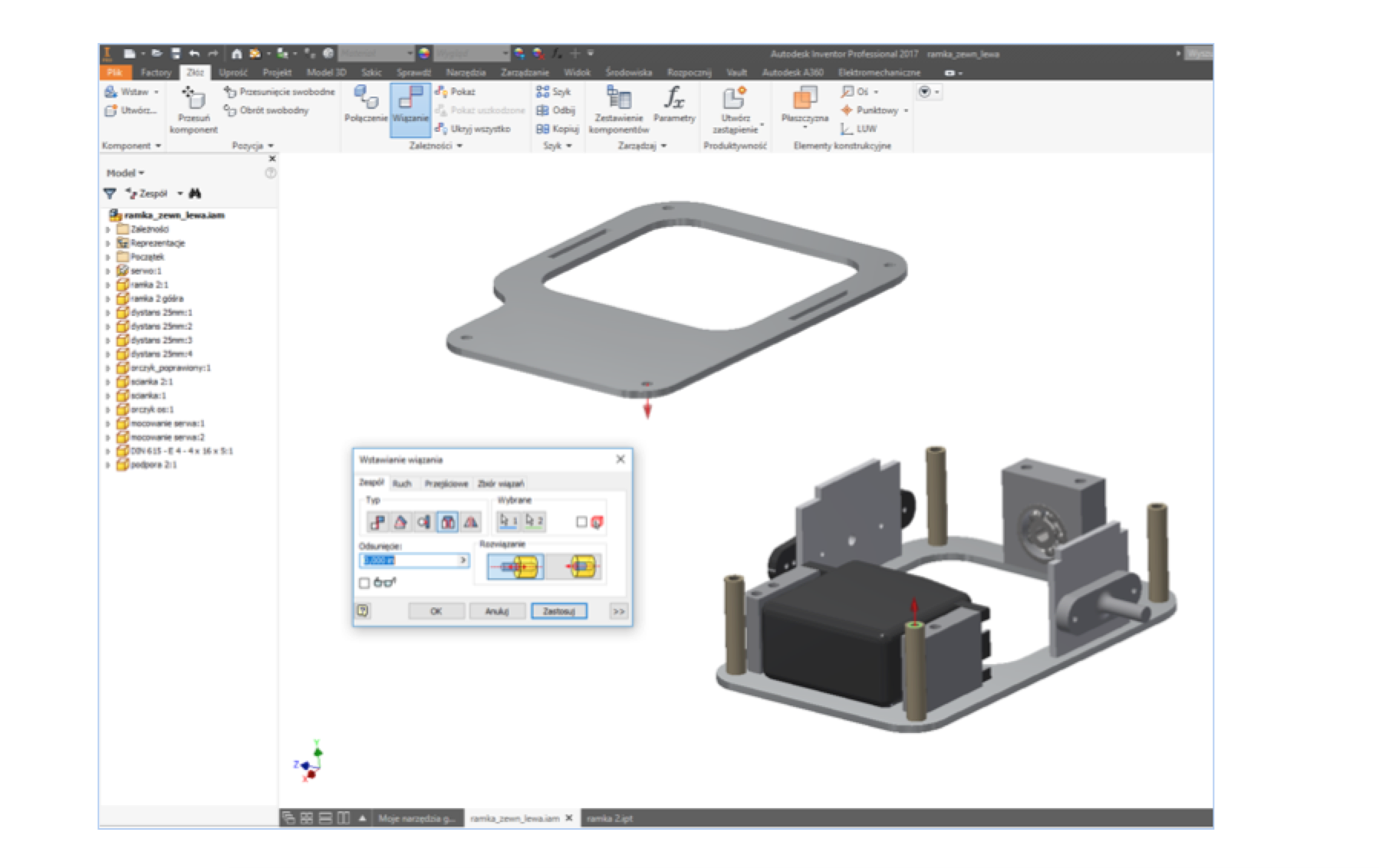
Pierwsza ramka (zewnętrzna) składa się z dwóch poziomych płyt, serwomechanizmu wraz z mocowaniem, podpory z łożyskiem oraz ścianek z orczykami, całość połączona jest dystansami (rysunek 1). Na jej przykładzie pokażemy jak zaprojektować podzespół ramki zewnętrznej w programie Autodesk Inventor, którą zamocujemy w całości zespołu.
Rysunek 1. Ramka zewnętrzna.
Projektowanie części mechanizmu w programie Autodesk Inventor 2017
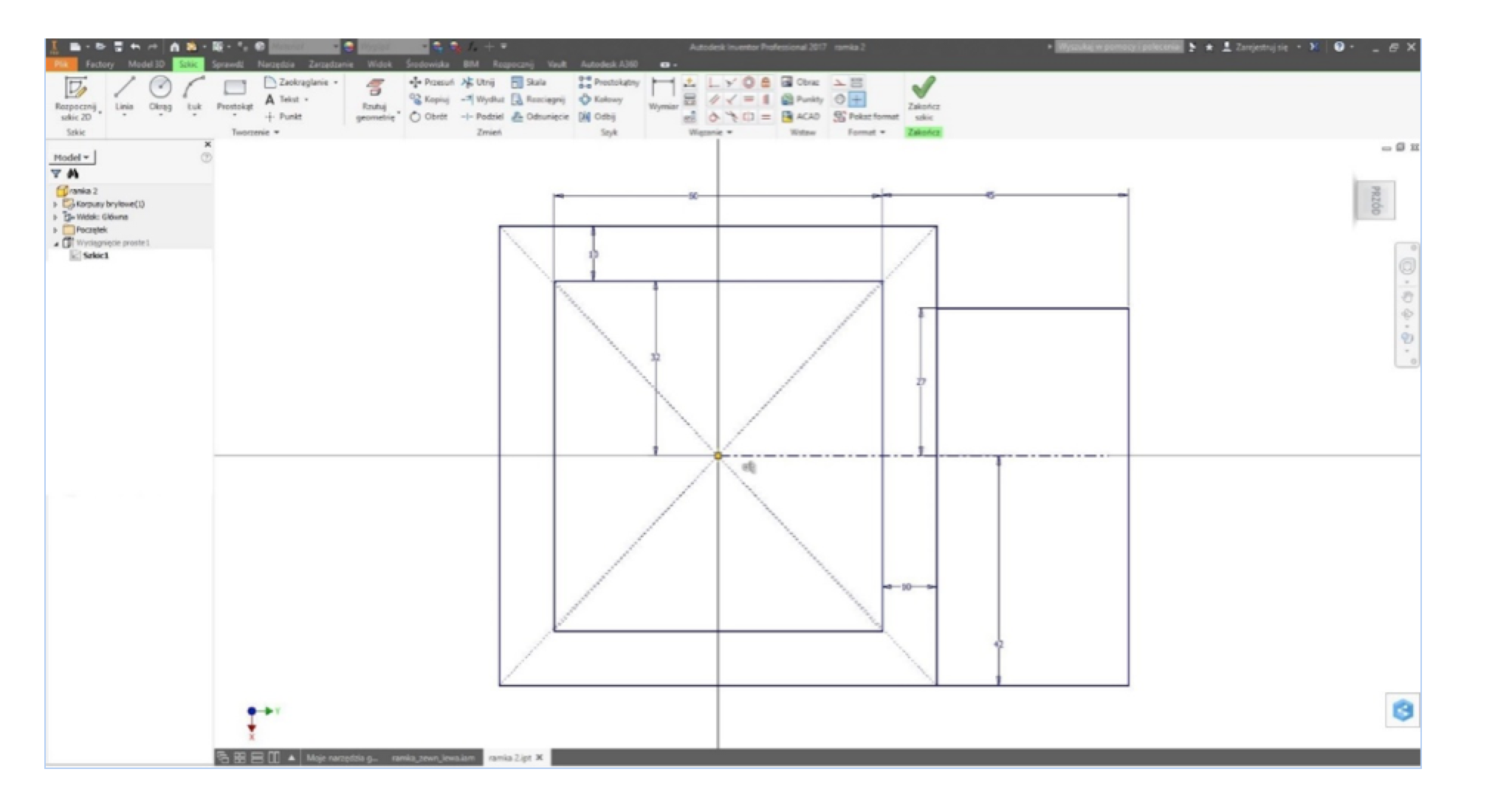
Aby utworzyć górną płytę należy zacząć od narysowania prostego szkicu z podstawowymi wymiarami (rysunek 2).
Rysunek 2. Szkic ramki wykonany w programie Autodesk Inventor 2017.
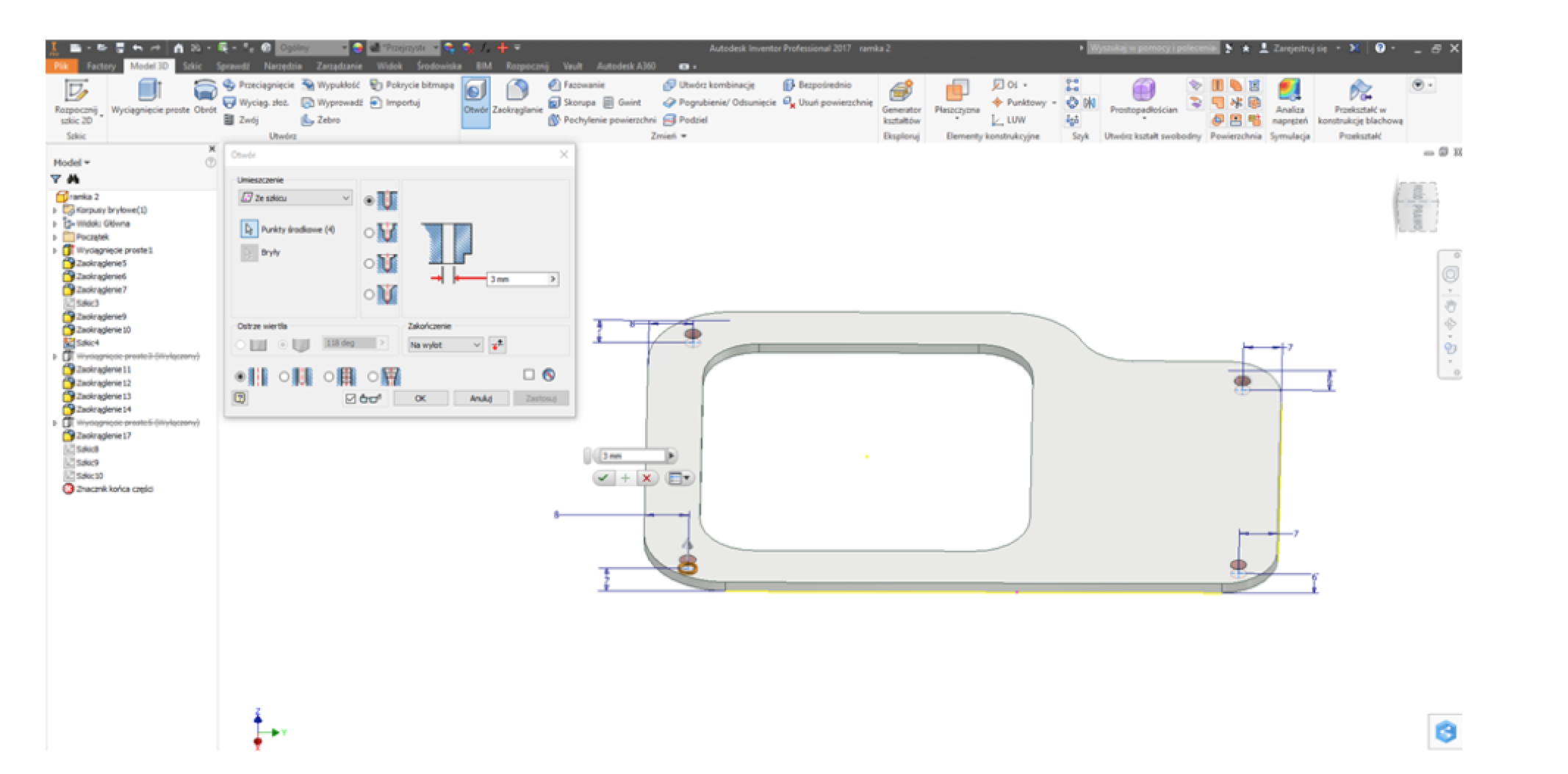
Po zakończeniu rysowania pierwszego szkicu należy użyć polecenia „Wyciągnięcie„, które nada płycie grubość. W tak powstałej bryle można dołączyć kolejny szkic z nowymi elementami, wykonać zaokrąglenie krawędzi, itp. Następnie, aby można było płytę zamocować należy wykonać kilka otworów. Położenie otworów zaznaczono za pomocą punktów na kolejnym szkicu umieszczonym na powierzchni płyty. Otwory w płycie zostały wykonane poleceniem „Otwór”, korzystając z kreatora otworów.
W podobny sposób za pomocą polecenia szkic, wyciągnięcie i funkcji z paska „Zmień” zaprojektowano kolejne części.
Projektowanie zespołu mechanizmu w programie Autodesk Inventor 2017
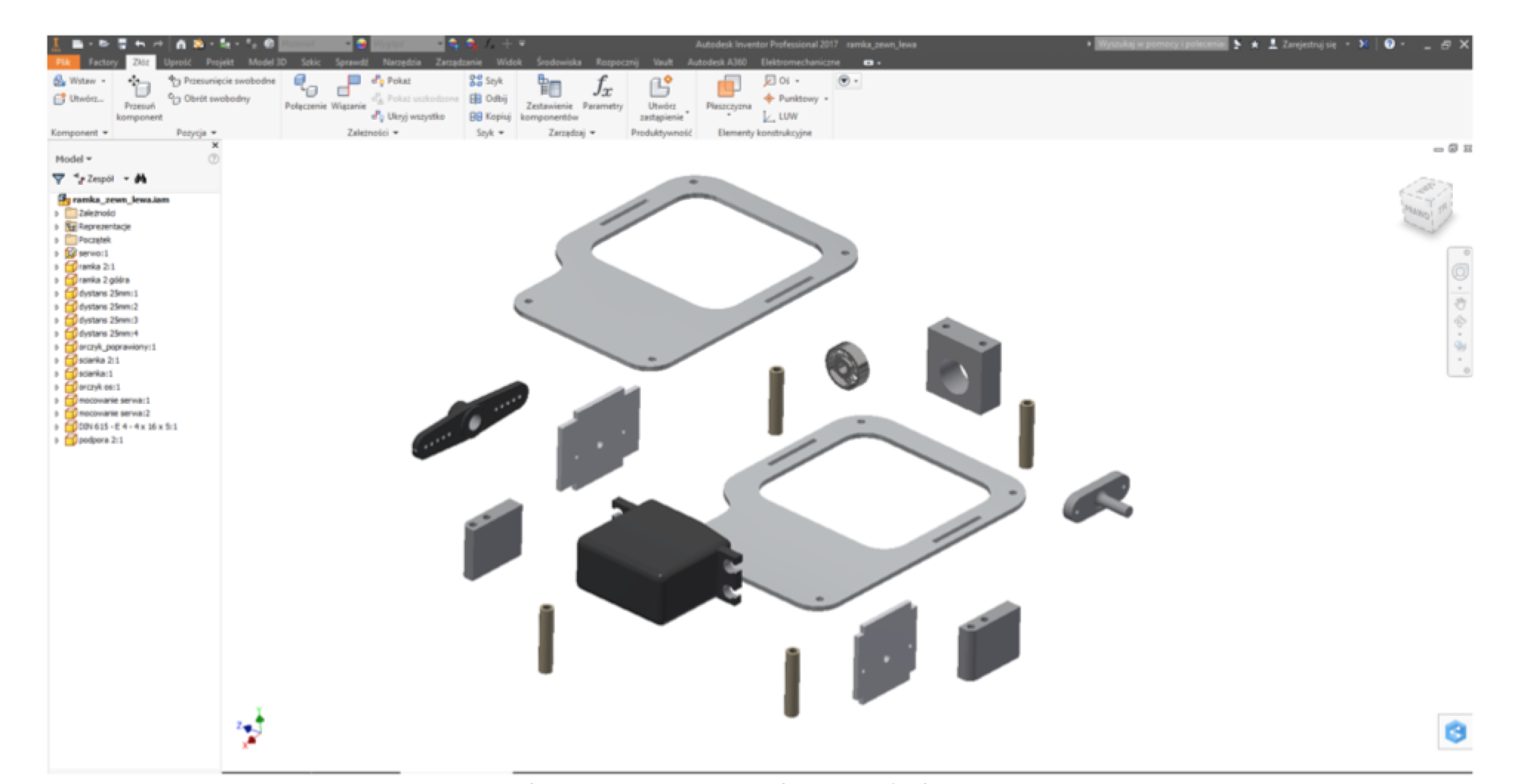
W celu zbudowania zespołu ramki, utworzono nowy plik zespołu i wstawiono do niego każdy z zaprojektowanych elementów (rysunek 4).
Rysunek 4. Tworzenie zespołu – Autodesk Inventor 2017.
Aby powiązać ze sobą wstawione elementy należy użyć polecania „Wiązanie„, które umożliwia zestawienie ze sobą w różny sposób poszczególnych elementów w zespole, np. używając wiązania wstawiającego łączono ze sobą elementy wybierając powierzchnie otworów (rysunek 5).
Rysunek 5. Łącznie elementów za pomocą wiązania wstawiającego – Autodesk Inventor 2017
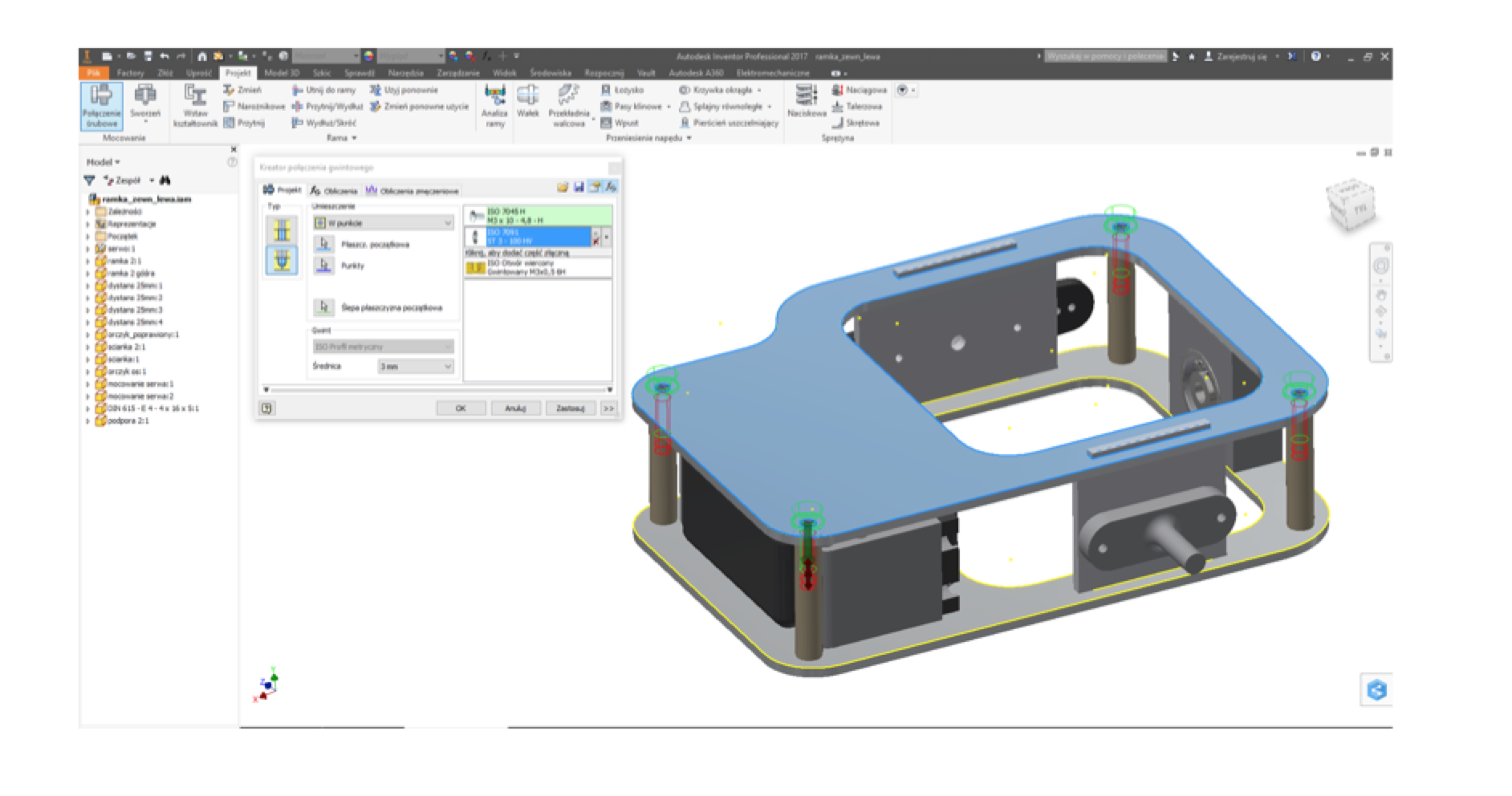
Korzystanie z biblioteki elementów znormalizowanych w programie Autodesk Inventor 2017
Program Autodesk Inventor 2017 posiada bardzo rozbudowaną bibliotekę elementów znormalizowanych. Elementów z biblioteki można użyć do wykonania połączeń między częściami. Używając funkcji „Połączenia śrubowe” w prosty i szybki sposób wstawiono śruby z podkładkami w przygotowane wcześniej otwory. Program sam dobiera średnice śruby wraz z podkładkami z biblioteki elementów znormalizowanych Content Center.
W taki sam sposób przygotowano każdy z podzespołów robota. Następnie stworzono zespół główny, wstawiając wszystkie przygotowane podzespoły zestawiono je stosując połączenia.
Taki sposób projektowania pozwala na stworzenie logicznej struktury projektowanego wyrobu. Podziała na części, podzespoły, zespoły czy zespół główny pozwala na właściwe zarządzanie projektowanym wyrobem, stworzenie dokumentacji wykonawczej, dokumentacji zestawieniowej, czy zbadanie zależności między podzespołami.
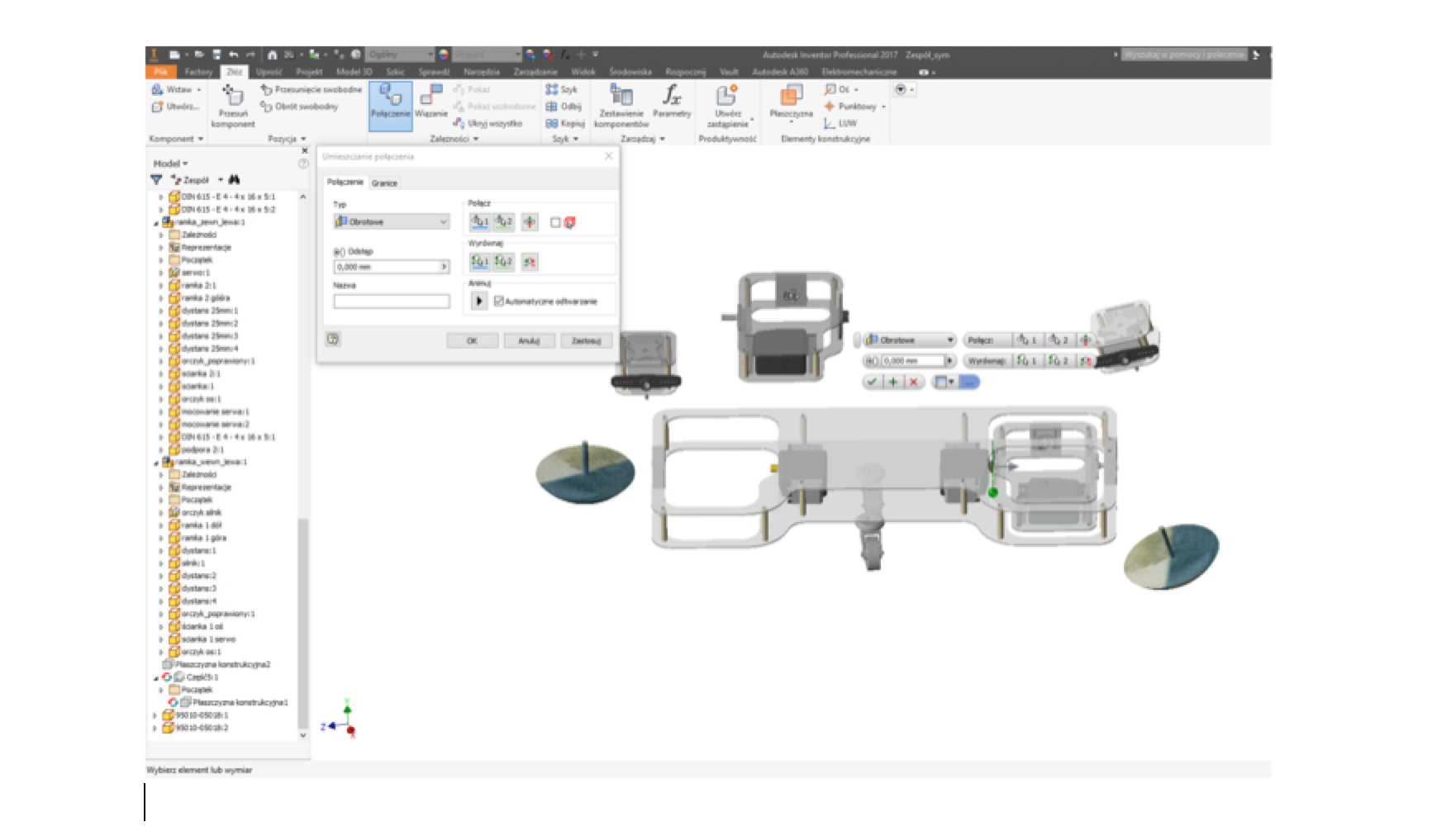
Wykonanie analizy wychylenia i zakresu ruchu podzespołów robota w Autodesk Inventor 2017
Korzystając z wiązań możemy określić zakres ruchu każdego z elementów robota. Przypisując zakres ruchu do ramki możemy badać jej położenie, dokonać analizy jej wychylenia, analizy kolizji w danym położeniu, wykonać symulację ruchu mechanizmu. Wszystkie te parametry wykorzystano w tworzeniu symulacji prezentującej działanie mechanizmu w czasie ruchu. Do połączenia elementów użyto polecenia „Połączenie – typ obrotowe„.
Rysunek 7.
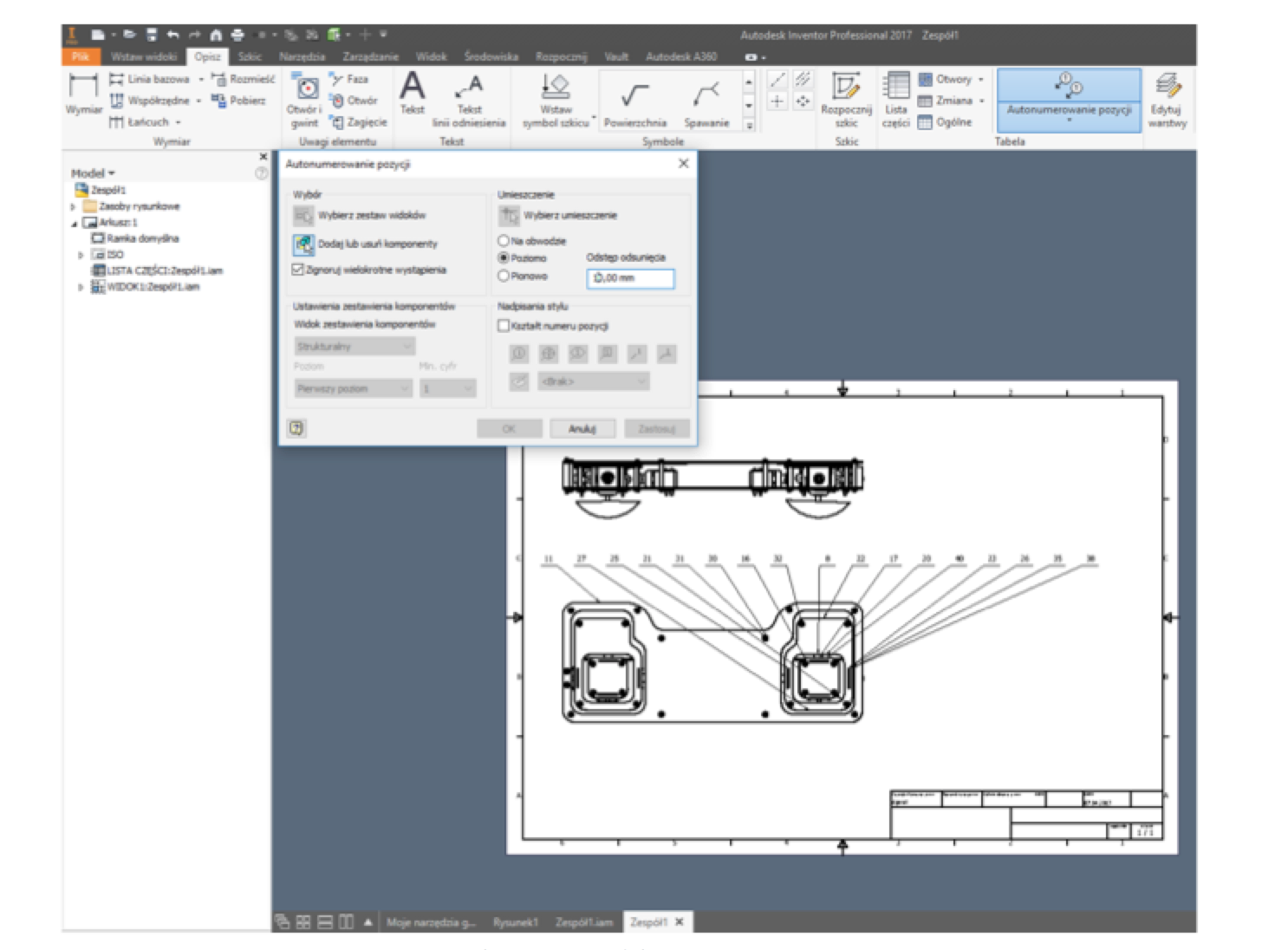
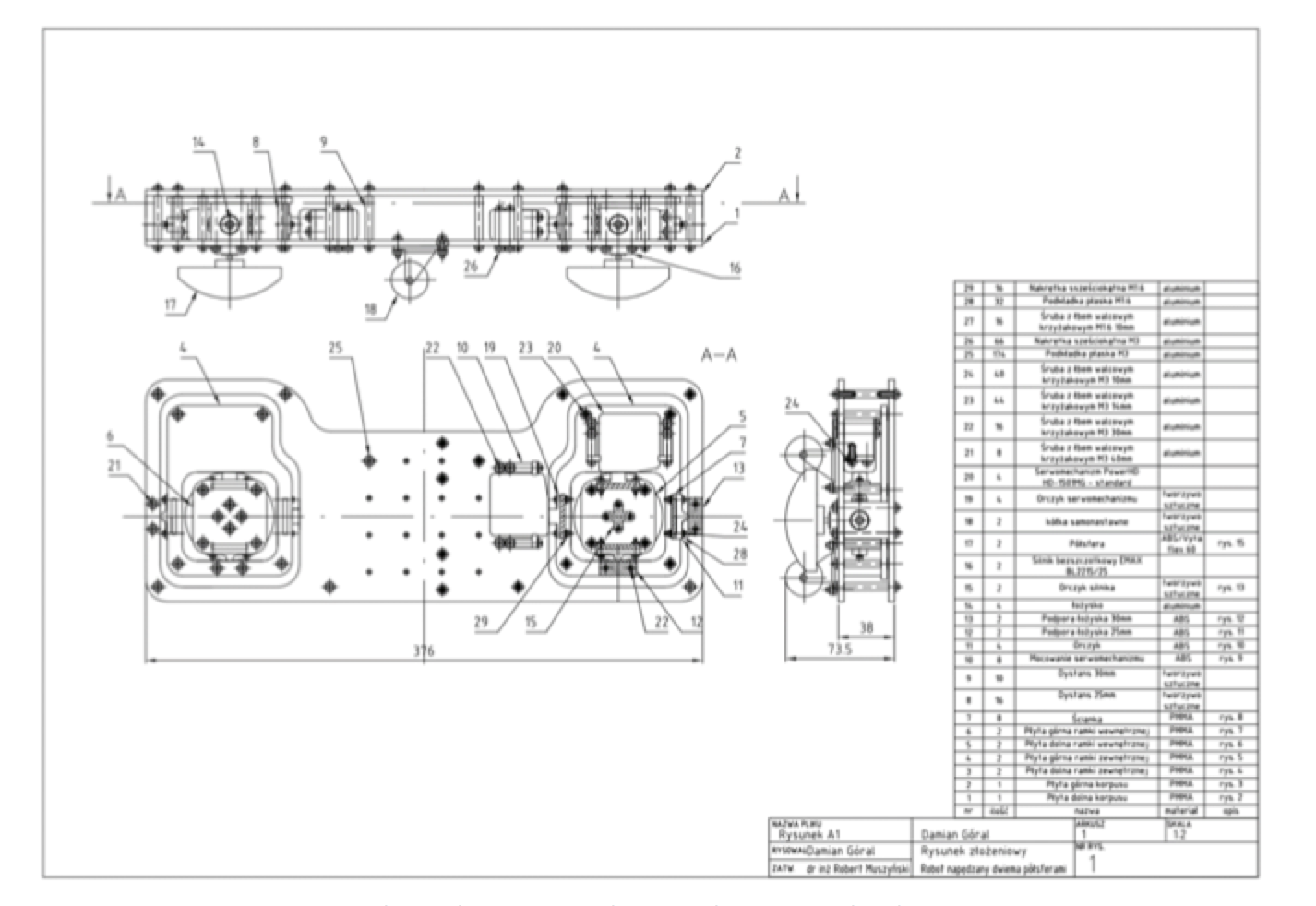
Wykonanie dokumentacji technicznej 2D robota w Autodesk Inventor 2017.
Po skończeniu projektowania części i zespołu należy wykonać dokumentację. Inventor Professional2017 dzięki swoim funkcjom tworzy ją niemal automatycznie. Szereg funkcji takich jak: rzut, widok, przekrój, szczegół, wyrwanie pozwalają na szybkie stworzenie odpowiednich widoków elementów czy zespołu. Polecenia do tworzenia opisów rysunków: autonumerowanie pozycji (rysunek 7), lista części, wymiarowanie, osie, opisy pozwalają w szybki sposób stworzyć dokładną dokumentacje produktu. Na rysunku 8 i 9 przedstawiono kompletną dokumentację zespołu robota.
My, PCC Polska Spółka Jawna, i nasi partnerzy, korzystamy na naszych stronach z plików cookies (ciasteczek). Część z nich jest niezbędna dla funkcjonowania stron. Pozostałe możemy wykorzystywać do:
- analizy w jaki sposób korzystasz z naszej strony,
- personalizacji prezentowanych Ci treści,
- marketingu, reklamy i na potrzeby mediów społecznościowych.
Te pliki cookie sa niezbędne dla poprawnego funkcjonowania strony internetowej. Umożliwiają działanie podstawowych funkcji takich jak nawigacja na stronie, preferencje prywatności, logowanie, wypełnianie formularzy i zapytań o ofertę. Nie mogą być wyłączone w naszej witrynie.
Preferencje
Służą do przechowywania informacji o preferencjach, o które nie prosi subskrybent lub użytkownik. Wykorzystywane są w celu interakcji z użytkownikiem, który wcześniej odwiedził witrynę.
Statystyka
Te pliki cookie pomagają nam zrozumieć, w jaki sposób różni użytkownicy zachowują się na stronie, gromadząc i raportując anonimowe informacje.Przechowywanie techniczne lub dostęp, który jest używany wyłącznie do anonimowych celów statystycznych. Bez wezwania do sądu, dobrowolnego podporządkowania się dostawcy usług internetowych lub dodatkowych zapisów od strony trzeciej, informacje przechowywane lub pobierane wyłącznie w tym celu zwykle nie mogą być wykorzystywane do identyfikacji użytkownika.
Marketing
Marketingowe pliki cookie służą do śledzenia użytkownika w witrynach internetowych, aby prezentować mu odpowiednie reklamy, interesujące i zgodnie z profilem użytkownika. Są bardziej cenne dla wydawców i reklamodawców zewnętrznych.