Rozpoczynamy cykl artykułów o procesie projektowania w oprogramowaniu Autodesk, na przykładzie robota mobilnego z bardzo nietypowym napędem, zaprojektowanego oraz wykonanego w Inventorze.
Autor: inż. Damian Góral
Platforma mobilna napędzana dwiema półsferami. Praca inżynierska zaprojektowana przy użyciu oprogramowania Autodesk.
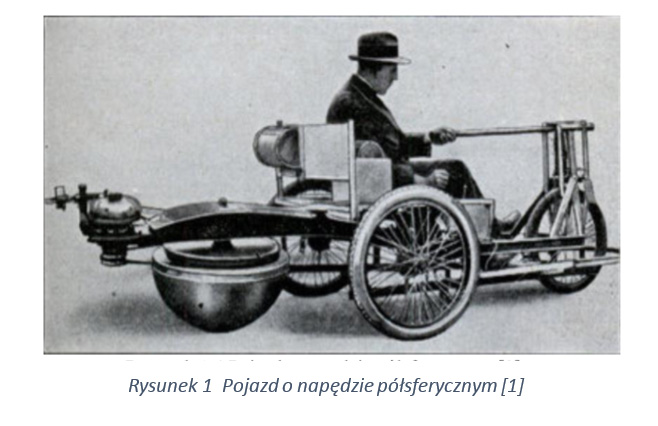
Tematem wspomnianej pracy było zaprojektowanie oraz wykonanie robota mobilnego napędzanego dwiema wirującymi półsferami. Pomysł jak i koncepcja konstrukcji takiego napędu miała opierać się o zaproponowany w latach 30 XX w. [1] pojazd napędzany wirującą półsferą (rysunek 1).
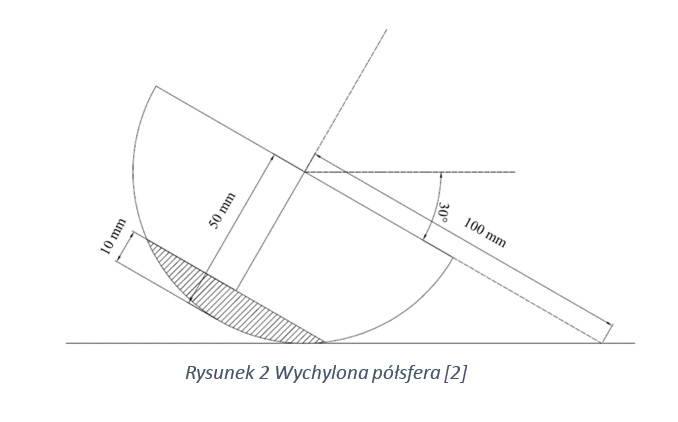
Elementem przenoszącym napęd w takim układzie jest wirująca półsfera. Taka półsfera, wprawiona w ruch wirowy wokół osi prostopadłej do podłoża, pełni funkcję rezerwuaru energii kinematycznej. W momencie każdorazowego odchylenia osi półsfery, zgromadzona energia służy do wprawienia w ruch postępowy napędzany pojazd.
Oczywiście energia półsfery jest nieustannie uzupełniana przez napędzający ją silnik. Dzięki temu pojazd jest w stanie poruszać się z dużym przyspieszeniem, z niemal nieograniczoną możliwością natychmiastowej zmiany jego kierunku. Według obliczeń pojazd o takim napędzie z półsferą o średnicy rzędu kilku centymetrów potrafiłby rozwinąć prędkość rzędu 100 km/h z przyspieszeniem ponad 10 m/s2 będąc przy tym bardzo zwrotnym. Dzisiejsze możliwości cyfrowego prototypowania oraz dostępność komponentów mechanicznych jak i elektronicznych pozwoliła na nowo zająć się koncepcją pojazdu z takim napędem, potęgując jego zalety wprowadzając drugą wirującą półsferę.
Pierwszym zadaniem, które stanęło przed studentem było zaprojektowanie mechanizmu wychylania półsfer w dwóch wzajemnie prostopadłych osiach z zachowaniem przyjętych założeń. Do przedstawienia schematów proponowanych mechanizmów użyto narzędzia do kreślenia 2D, jakim jest AutoCAD. Poniżej przedstawiono zaproponowane przez studenta schematy mechanizmu wychylania półsfer.
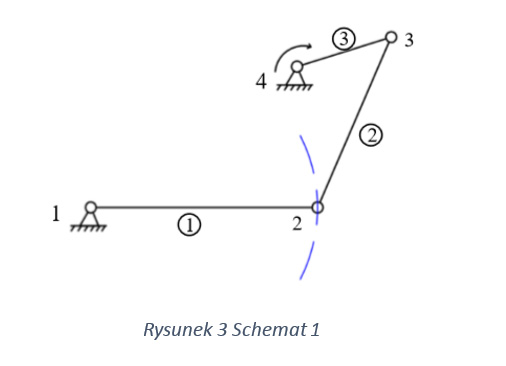
1. Wychylanie półsfer za pomocą cięgien – Pierwszą propozycją jest mechanizm cięgnowy (rysunek 3) w którym człon 3 napędzany serwomechanizmem poprzez człon 2 wychyla półsferę. Mechanizm prosty w wykonaniu, natomiast wymagana sztywność konstrukcji przy takim rozwiązaniu nie zostałaby zachowana. Przenoszenie momentu poprzez cięgna wiąże się z podatnością na drgania.
bbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbb
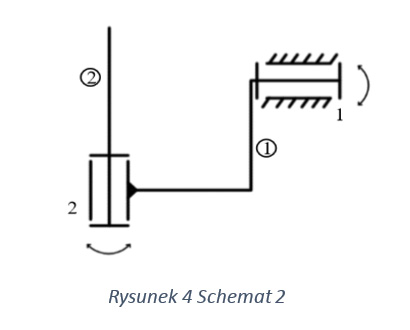
2. Mechanizm gimbala o otwartym łańcuchu kinematycznym – Kolejną propozycją jest mechanizm (rysunek 4) znany z gimbali (urządzeń do stabilizacji kamery np. w dronach). Bezpośrednie przełożenie momentu eliminuje powstawanie dodatkowych drgań.
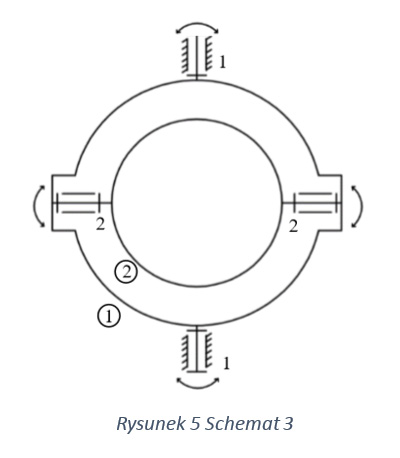
3. Mechanizm gimbala o zamkniętym łańcuchu kinematycznym – Wprowadzenie naprzeciw każdego z napędów dodatkowego przegubu zapewnia dodatkową sztywność co jest bardzo istotne dla mechanizmu wychylania półsfer (rysunek 5).
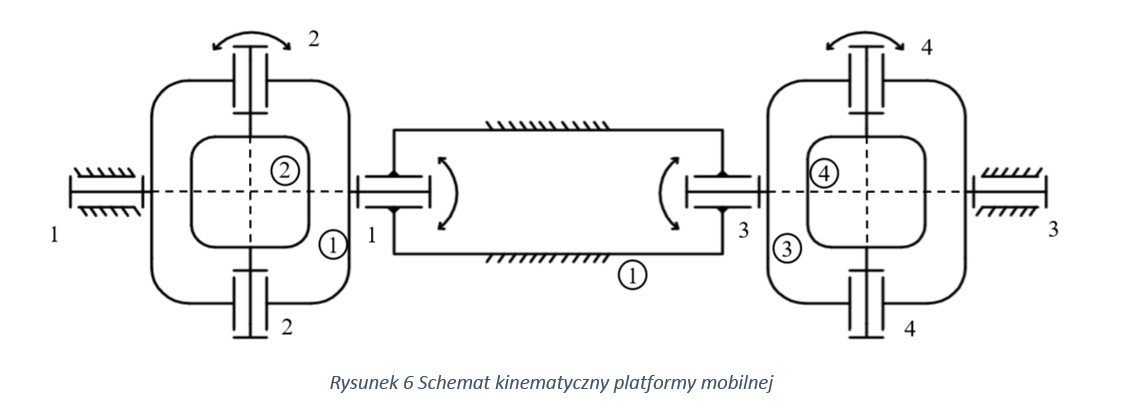
Ostatecznie, bazując na przedstawionych rozwiązaniach, zaprojektowano mechanizm, którego schemat przedstawiono poniżej:
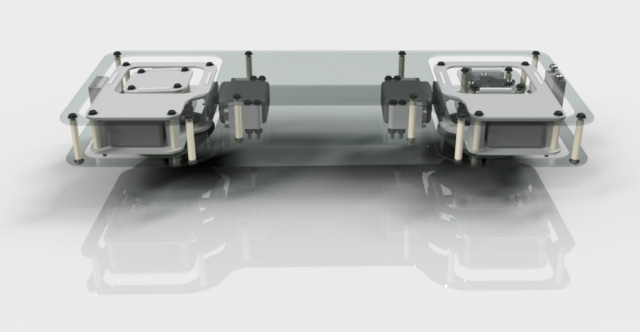
Mając zaprojektowany mechanizm należało przygotować model 3D robota. Całość została zaprojektowana w programie Autodesk Inventor, czego końcowy efekt pokazano na rysunku 6. W kolejnych częściach cyklu przedstawimy proces modelowania robota jak i wykorzystanie modeli w produkcji elementów.
Źródła:
[1] Unknown. Hemisphere drive speedster. Mechanics and Handicraft, 1938, wolumen 5, numer 9, s. 23, 73. Przez Modern Mechanix, http://blog.modernmechanix.com/hemisphere-drivespeedster/.
[2] D. Góral. Konstrukcja robota mobilnego napędzanego dwiema półsferami, Praca inżynierska, Politechnika Wrocławska 2017
My, PCC Polska Spółka Jawna, i nasi partnerzy, korzystamy na naszych stronach z plików cookies (ciasteczek). Część z nich jest niezbędna dla funkcjonowania stron. Pozostałe możemy wykorzystywać do:
- analizy w jaki sposób korzystasz z naszej strony,
- personalizacji prezentowanych Ci treści,
- marketingu, reklamy i na potrzeby mediów społecznościowych.
Te pliki cookie sa niezbędne dla poprawnego funkcjonowania strony internetowej. Umożliwiają działanie podstawowych funkcji takich jak nawigacja na stronie, preferencje prywatności, logowanie, wypełnianie formularzy i zapytań o ofertę. Nie mogą być wyłączone w naszej witrynie.
Preferencje
Służą do przechowywania informacji o preferencjach, o które nie prosi subskrybent lub użytkownik. Wykorzystywane są w celu interakcji z użytkownikiem, który wcześniej odwiedził witrynę.
Statystyka
Te pliki cookie pomagają nam zrozumieć, w jaki sposób różni użytkownicy zachowują się na stronie, gromadząc i raportując anonimowe informacje.Przechowywanie techniczne lub dostęp, który jest używany wyłącznie do anonimowych celów statystycznych. Bez wezwania do sądu, dobrowolnego podporządkowania się dostawcy usług internetowych lub dodatkowych zapisów od strony trzeciej, informacje przechowywane lub pobierane wyłącznie w tym celu zwykle nie mogą być wykorzystywane do identyfikacji użytkownika.
Marketing
Marketingowe pliki cookie służą do śledzenia użytkownika w witrynach internetowych, aby prezentować mu odpowiednie reklamy, interesujące i zgodnie z profilem użytkownika. Są bardziej cenne dla wydawców i reklamodawców zewnętrznych.